
|
Modellbau
Einen Quadkopter selber bauen |
|
"Blog" zum Bau eines Quadkopters (ältester Eintrag zuunterst)
|
|
|
Juli 2015 Bevor gestartet werden kann |
Arming: Motore für den Start vorbereiten Kompass Ausrichtung: Wurde das GPS-Board in der richtigen Richtung montiert (Der Pfeil zeigt in Flugrichtung) und der Flugkontroller wurde ebenfalls mit der richtigen Seite nach oben und dem Pfeil nach vorne montiert, muss der Wert COMPASS_ORIENT auf "Roll 180" oder "8" gestellt werden, weil der Kompass verkehrt unter der GPS Antenne sitzt. Das wird folgendermassen gemacht: - Die AMP Mission Planer Software starten, den Ardukopter über USB am PC anschliessen, und "Connect" klicken. - Den "Hardware" Tab wählen, dann links den "Mandatory Hardware" Tab wählen und dann zum "Compass" Tab - Aus der Auswahlliste den Eintrag "ROTATION_ROLL_180" auswähen. |
|
Juli 2015 Grundkonfigurationen |
ESC Kalibration: einschalten bei full throttle Test/Kalibration der Fernsteuerung: Kanal 2 invertieren |
|
Juli 2015 Software konfigurieren |
Die Software zum laufen zu bringen war der komplizierteste Task! Die AMP Mission Planer Software kann hier heruntergeladen werden: http://ardupilot.org/planner2/docs/installing-apm-planner-2.html Leider ist es mit der Installation der SW nicht getan, der benötigte Treiber (FTDI USB Serial Driver 10_4_10_5_10_6_10_7, liegt dem APM Planer bei) muss installiert werden (Unter OS-X 10.11 El Capitan offenbar nicht mehr). Ich habe einiges probiert, habe leider nicht alles dokumentiert. Auf jeden Fall lief es dann plötzlich (vorerst über USB) |
|
Juni 2015 Einschalten 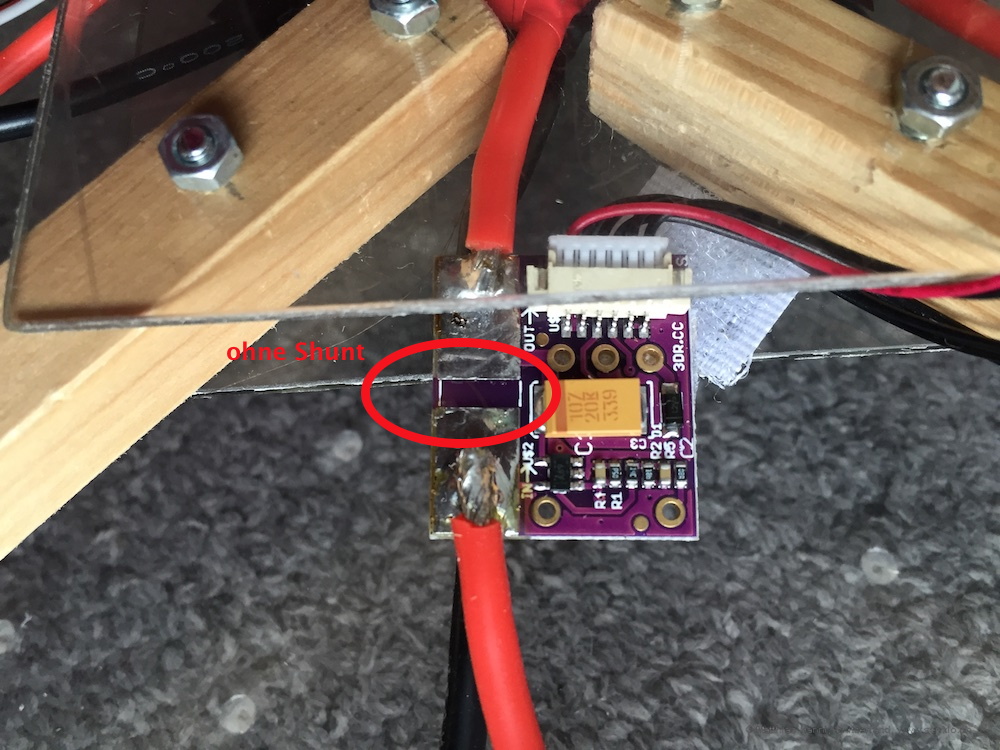
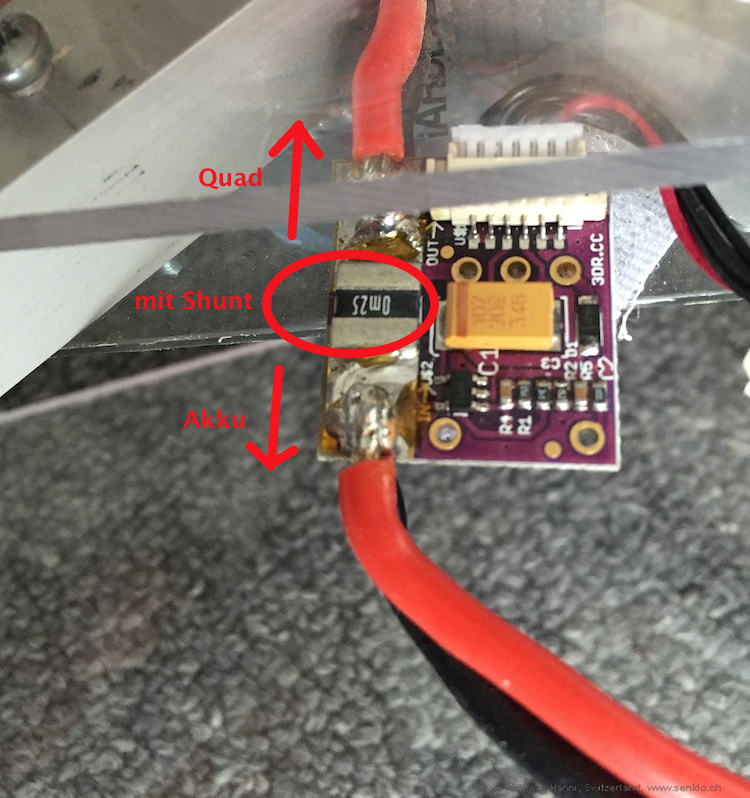 |
Leider brachte das erste Anschliessen des Akkus nicht den gewünschten Effekt. Der Ardupilot (Das Hauptmodul zur Steuerung des Multikopters) und auch die Motoren und alle übrigen Komponenten taten keinen Wank. Offenbar funktionierte die Stromversorgung nicht. Die Lösung war dann aber ganz einfach, jedoch nicht so einfach zu beheben. Auf dem Power Management Modul fehlte der Shunt Wiederstand. (0m25 = 0.25 mΩ = 0.00025 Ω) Ich habe mit dem chinesischen Online-Shop www.dx.com Kontakt aufgenommen und erhielt anstandslos ein Ersatzmodul zugesandt. Auf den Bildern ist der Unterschied (und die Wichtigkeit dieses Bauteils) gut zu sehen. Und plötzlich läuft's! |
|
Juni 2015 Maximaler Strom berechnen |
Akku: Die möglichen hohen Ströme aus den LiPo (Lithium Polimer) Akkus ist nicht ganz zu vernachlässigen. Der maximale Strom ist folgendermassen zu berechnen. Akku-Kapazität in Ah * maximale Entladerate (C-Wert) = maximaler Strom z.B.: 2,2Ah * 20C = 44A Dies ergibt für 20 cm lange Kupferkabel (z.B. für die Stromversorgung) einen benötigten Querschnitt von etwa 2mm2 ESC: Die Steuerung des Motors (ESC = Electronic Speed Controller) muss der maximalen Leistungsaufnahme des Motors gewachsen sein. Wir haben uns für einen Motor mit der Modellbezeichnung 2830-12 entschieden, laut Datenblatt leistet dieser Motor maximal 187 Watt. Somit errechnet sich der maximale Strom folgendermassen: Leistung in Watt / Spannung in Volt = Strom in Ampère In unserem Fall: 187W / 11.1V = 16.8A das bedeutet, dass ein 20A ESC ausreichen wird. |
|
Juni 2015 Flug-Elektronik zusammenstecken 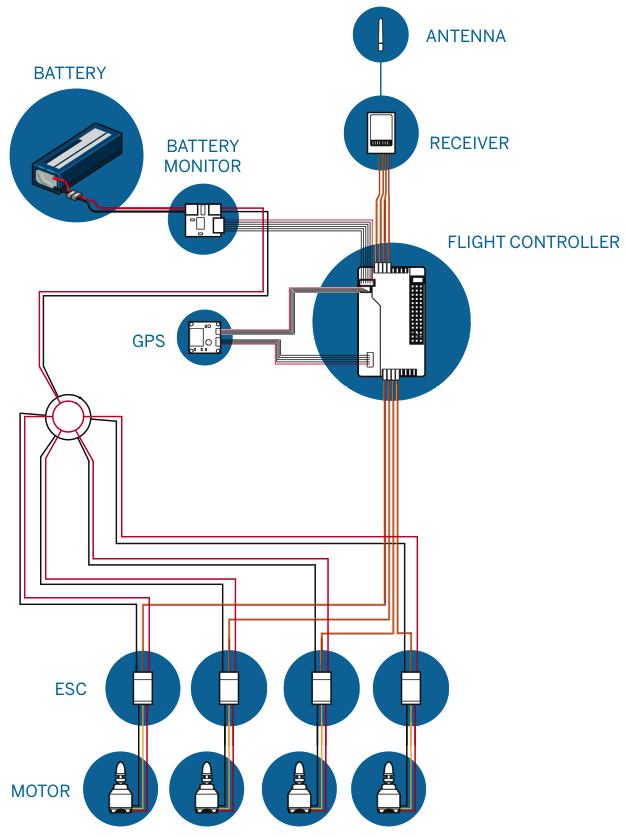 Bild 1 Bild 2 Bild 3 |
Eine günstige 6-Kanal Fernsteuerung habe ich mir inzwischen auf ricardo.ch ersteigert. CHF 46 (Somit liegen wir nun inklusive Kleinmaterial bei ca. CHF 250.-) Die Elektronik-Komponenten wurden zusammengesteckt. (Bild 3) - Die (mindestens 4) Kanäle des Empfängers werden 1:1 auf die Eingänge des Arducopters verbunden (Bild 1) - Die Anschlüsse der ESC mit den Ausgängen 1-4 des Arducopters verbinden - Das GPS Modul auf "GPS" (für die Position) und "I2C" (für den Kompass) des Arducopters (Bild 2) - Das Power Management Modul auf "PM" des Arducopters (Stromversorgung) - Die Stromverteilung vom Power Management Modul auf die ESC muss gelötet werden (genügend dicke Kabel verwenden) - Die ESC an die Motoren anlöten. Vorerst mal egal wie, die Drehrichtung der Motoren wird später kontrolliert |
|
Juni 2015 Flug-Elektronik eingetroffen |
Die Elektronik-Komponenten sind aus China eingetroffen. - Arducopter - der Flight Controller $62 - Das GPS Modul UBLOX LEA-6H (im Bundle mit dem Arducopter bestellt) - Vier ESC 20A SimonK - die Motor Steuerung $29 - Power Management Modul 90A (Battery Monitor) $11 - Vier Motoren - 850KV 2830 $52 - 2 Paar Propeller 9047 9''x 4.7'' $5 - LiPo Akku 2.2 Ah hier lohnt es sich ein Qualitätsprodukt zu kaufen CHF 22 - LiPo Ladegerät $12 |
|
Juni 2015 Rahmen bauen 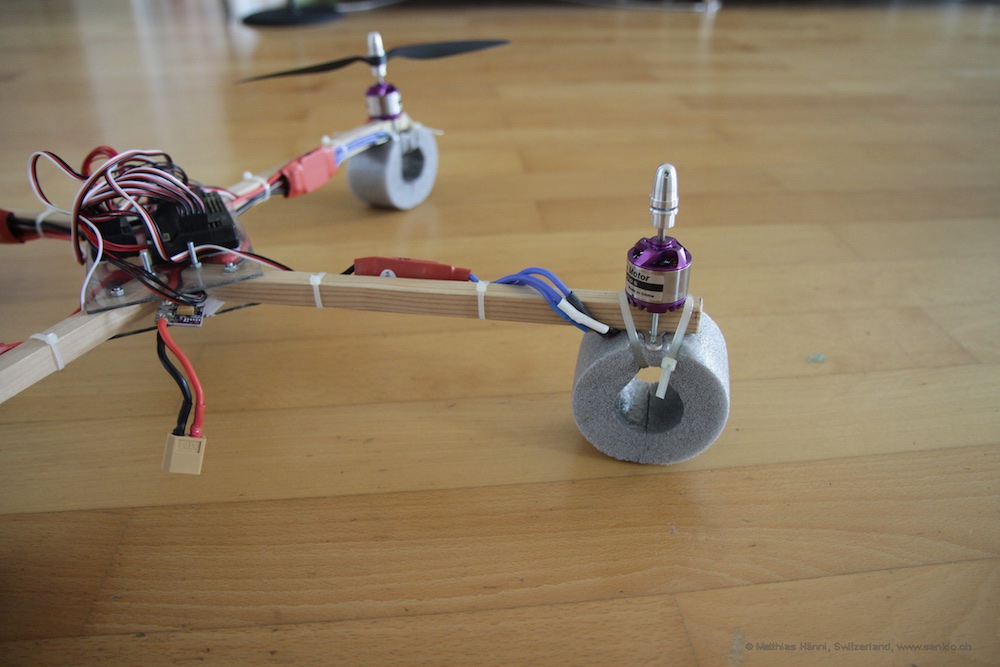
|
Betreffend Abmessungen halten wir uns vorerst strikt an den Plan von Make: PDF Wir halten die Kosten gering. Mit Elektronik direkt aus China, vorhandenem Tannen-Holz für die Ausleger und 2mm Plexiglas Grundplatten (was halt grad' so rumlag). Wie gesagt vorerst ohne Gimbal (Kameraaufhängung) und Kamera. Auch ein Landegestell lassen wir vorerst weg. Wir ersetzen dieses durch Schaumstoff-Ringe welche wir mit einem scharfen Messer von einer Rohr-Isolierung abschneiden und mit 2 Kabelbindern an den Auslegern befestigen. (Siehe Bild) |
|
Mai 2015 Material einkaufen |
Einen Teil des Materials, vorwiegend die mechanischen Komponenten wie Holz, Alu-Vierkant-Rohr, Plexiglas, Kunststoffteile, Kabelbinder, Klett-Band u.s.w. hatte ich noch zu Hause rumliegen, oder habe ich in den nahegelegenen Migros oder Coop Bau und Hobby Abteilungen beschafft. |
|
Mai 2015 Material bestellen |
Und los geht's. Auf der Suche nach den passenden Komponenten (welche auf der Seite von Make: zwar aufgeführt sind, aber ohne Bezugsquelle) habe ich mindestens das gesamte Internet eimal durchforstet. Dabei bin ich auf folgenden Seiten gelandet: GoodLuckBuy.com - Schlussendlich habe ich das Meiste elektronische Material hier gekauft. DX.com - Chinesischer Online Händler. Die haben alles. (Oft auch Ramsch) Hobbyking - Amerikanischer Hobby Shop mit Ableger in Europa. Im meinen Augen zu teuer. |
|
April 2015 Der Plan |
Ich habe mich entschieden vorerst zu versuchen einen flugfähigen Quadkopter mit möglichst wenig finanziellem Aufwand zu bauen. Da wir ja noch gar nicht wussten, ob wir das Ding überhaupt zum fliegen bringen, und ob das Fliegen eines ferngesteuerten Multikopters uns überhaupt Spass macht. Das heisst wir halten uns an den Plan vom Make: und lassen einfach die Gimbal (Kamerabefestigung) und die Telemetrie (kabellose Übertragung der Flugdaten) vorerst weg. So konnten wir von Materialkosten von max. CHF 300.- ausgehen. Und schliesslich wollten wir ja etwas eigenes bauen. |
|
März 2015 Der Startschuss |
Gerne hätte ich für meine Kinder (und mich ;-)) einen richtigen schönen Multikopter gekauft (z.B. DJI ab 500 € ohne Zubehör). Dies hätte aber wohl deutlich unser Hobby-Budget gesprengt, und ob das Fliegen eines ferngesteuerten Modells, dann wirklich unser Hobby geworden wäre, war ja zu diesem Zeitpunkt auch noch nicht klar... Plötzlich stolperte ich dann über folgenden Link des Make: Magazins. Build a Quadcopter Drone with a Self-leveling Camera Gimbal Jetzt war de Startschuss gefallen, zumal hier versprochen wird, für ein paar Dollar einen flugfähigen Quadkopter selber bauen zu können, und meine Kinder versicherten beim Aufbau behilflich zu sein. Cool ein gemeinsames Projekt! |
|
Dezember 2014 Wie alles begann |
Am Anfang stand der Wunsch meiner Kinder, eigene ferngesteuerte Flugzeuge/Hubschrauber/Multikopter zu besitzen. Der 1. Versuch mit einem kleinen, günstigen, gekauften Quadkopter scheiterte am Billig-Modell. (CHF 30.- DayDeal.ch) Die Steuerung war zu wenig präzise und es wollte einfach keine Freude am Fliegen aufkommen. |
|
© 2003-2026 M. Hänni. all rights reserved. Diese Bilder dürfen nicht ohne meine Einwilligung verwendet werden! |
|
|
M. Hänni 19. Nov. 2022 11:50
|